हाई-क्लाउड, 3डी लेजर स्कैनिंग तकनीक में अग्रणी।
 |
| उत्पत्ति के प्लेस: | चीन |
| ब्रांड नाम: | Hi-Cloud |
| प्रमाणन: | ISO, others upon the requests |
| मॉडल संख्या: | 3डी लीडर हिस्लाम |
| न्यूनतम आदेश मात्रा: | 1 |
|---|---|
| मूल्य: | negotiable |
| पैकेजिंग विवरण: | परिवहन मामला |
| प्रसव के समय: | 20 कार्य दिवस |
| भुगतान शर्तें: | टी/टी |
| आपूर्ति की क्षमता: | 20 सेट/माह |
| आवेदन: | भवन मुखौटा माप | श्रेणी: | 120मी@20% |
|---|---|---|---|
| स्कैनिंग प्वाइंट फ्रीक्वेंसी: | 300,000 अंक/सेकंड | सिस्टम सटीकता: | 10 सेमी |
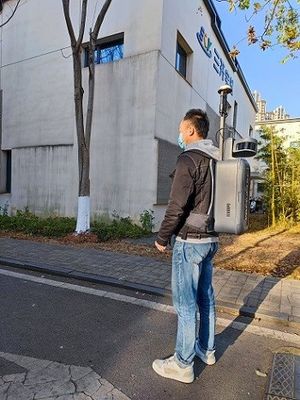
| ऑपरेशन मोड: | हैंडहेल्ड / बैकपैक | वज़न: | <2.5 किग्रा |
| प्रमुखता देना: | बैकपैक 3D LiDAR HiSLAM,हैंडहेल्ड 3D LiDAR HiSLAM,120m रेंज HiSLAM |
||
मुखौटा माप के निर्माण में 120 मीटर रेंज हैंड-हेल्ड या बैकपैक 3D LiDAR HiSLAM
भवन का मुखौटा माप न केवल पुराने भवनों के उन्नयन और डिजिटल शहर के निर्माण में 3 डी मॉडल निर्माण की मुख्य परियोजना है, बल्कि प्राचीन इमारतों की सुरक्षा और नई इमारतों (संरचनाओं) के मुखौटा परिणामों के अधिग्रहण की तत्काल मांग भी है।वर्तमान में, मुखौटा माप के निर्माण की कठिनाइयाँ मुख्य रूप से निम्नलिखित दो बिंदुओं में परिलक्षित होती हैं: पहला, भवन के मुखौटे के माप के लिए उच्च स्तर की विस्तार परिशोधन की आवश्यकता होती है;इमारतों के आकार सुविधा बिंदु कई हैं, डेटा अधिग्रहण मुश्किल है, और माप दक्षता कम है।दूसरा, भवन का मुखौटा माप कार्य बड़ा है और समय चक्र छोटा है।पारंपरिक थियोडोलाइट चौराहे विधि, कुल स्टेशन प्रिज्म मुक्त माप, रेंजफाइंडर, स्टील शासक माप और अन्य भवन माप विधियों में अपर्याप्त संचालन दक्षता की गंभीर कमियां हैं।
3डी लेजर स्कैनर तकनीक के विकास और एसएलएएम तकनीक पर आधारित हैंडहेल्ड 3डी लेजर स्कैनर के उद्भव के साथ, यह मुखौटा माप के निर्माण के लिए नए समाधान लाता है। कॉम्पैक्ट, पोर्टेबल और मोबाइल स्कैनिंग की विशेषताओं के साथ, यह प्रभावी रूप से स्कैनिंग दक्षता में सुधार कर सकता है।
HiSLAM पर आधारित मुखौटा माप के निर्माण की प्रक्रिया में तीन मुख्य चरण शामिल हैं: क्षेत्र सर्वेक्षण, क्षेत्र डेटा संग्रह और आंतरिक डेटा प्रसंस्करण।इमारतों के उच्च-सटीक 3D लेजर पॉइंट क्लाउड डेटा को HiSLAM फील्ड डेटा अधिग्रहण ऑपरेशन के माध्यम से प्राप्त किया जा सकता है, और फिर मैनुअल इन-जॉब मैपिंग ऑपरेशन जल्दी और कुशलता से मुखौटा जानकारी प्राप्त कर सकता है।
विनिर्देश
| आइटम | मापदंडों |
| सिस्टम सटीकता | ≤10 सेमी (आउटडोर पूर्ण सटीकता) |
| ≤10 सेमी (इनडोर सापेक्ष सटीकता) | |
| माप श्रेणी | 120मी@20% |
| स्कैनिंग प्वाइंट फ्रीक्वेंसी |
300,000 अंक/सेकंड |
| पैनोरमिक कैमरा | 12MP |
| आधार सामग्री भंडारण | 512GB एसएसडी |
| डेटा ट्रांसमिशन | गीग/USB3.0 |
| बैटरी की आयु | 4h |
| प्रचालन तापमान |
-10-50 ℃, आर्द्रता <85% |
| वज़न | <2.5KG (हाथ में होस्ट) |
| ऑपरेशन मोड | हैंडहेल्ड / बैकपैक |
लाभ
1. एकीकरण: अत्यधिक एकीकृत, इनडोर और आउटडोर एकीकरण
2. अंशांकन मुक्त: अंशांकन वाहक से स्वतंत्र है
3. उच्च सटीकता: उच्च बिंदु बादल घनत्व, उच्च बिंदु मान्यता दर, उच्च माप सटीकता
4. उच्च विश्वसनीयता: उत्पादीकरण की उच्च डिग्री, स्थिर और विश्वसनीय प्रणाली
5. उच्च बुद्धि: बिंदु बादल का सहज एकीकरण एक पैनोरमा
SLAM तकनीक पर आधारित हैंडहेल्ड 3D लेजर स्कैनर के साथ भवन के अग्रभाग माप परिणाम
![]()
व्यक्ति से संपर्क करें: Mr. EPiC Team
दूरभाष: +8618520517897